Соҳаи ариза
Мошини электронии гидротикии сервери экспиге, ки ба воситаи мошини санҷишӣ номида мешавад, асосан барои озмоиши хусусиятҳои динамикии металлҳо, ғайримоляторӣ дар ҳарорати хонагӣ истифода мешавад (ё ҳарорати баланд ва ҳарорати пасти муҳити зист). Мошини санҷиш метавонад санҷишҳои зеринро иҷро кунад:
Санҷиши шиддат ва фишурдасозӣ
Санҷиши тарқишёбанда
Системаи назорати сертификати кўмаки серверҳои аз нермерҳои барқӣ, калони сервер, сенсорҳои тестӣ, васеъ кардани параметрҳои санҷишӣ, ба монанди қувваи озмоишӣ, масхара, деформат, деформат ва кунҷ.
Мошини санҷиш метавонад мавҷи синол, мавҷи сеюми муросилот, мавҷи мураббаъ, мавҷи зиддеорда, мавҷи собарӣ ва дигар сангҳо, сикли хастагӣ ва тестҳои хастагӣро амалӣ кунад. Он инчунин метавонад бо дастгоҳи санҷиши экологӣ барои пур кардани санҷишҳои экологӣ дар ҳарорати гуногун муҷаҳҳаз карда шавад.
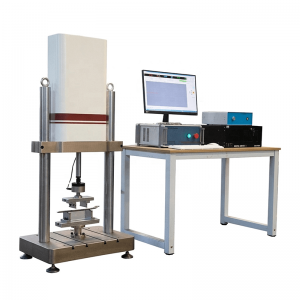
Мошини санҷиш барои фаъолият ба таври тағйирёбанда ва қулай аст. Лифтро бардошта, қулфкорӣ, қулф кардан ва Spightimen-и намунавӣ бо амалиёти тугма ба итмом мерасанд. Он технологияи пешрафтаи гидротибиро ба боркунӣ, санҷишҳои дақиқи динамикӣ баландтар мекунад, санҷиши сарбории босифат ва тағйирёбандаи тағйирёбанда барои чен кардани қувваи намуна. Арзиш ва муҳоҷират. Системаи андозагирии рақамӣ ва назорати рақамӣ пиро аз назорати қувва, деформа ва ивазкунии рақамӣ дарк мекунад ва ҳар як назорат метавонад ба таври мусоид фароҳам оварда шавад. , Барномаи озмоишӣ дар муҳити Windows XP / Wink7, бо функсияҳои пурқудрати маълумот кор мекунад, шароити озмоишӣ ва натиҷаҳои санҷиш ба таври худкор сабт, намоиш ва чоп карда мешавад. Раванди санҷиш пурра ба назорати компютер дохил карда шудааст. Мошини озмоишӣ системаи идеалии санҷиши санҷишӣ барои институтҳои илмӣ, сохтмони металлургӣ, саноати миллии мудофиа ва низомӣ, донишгоҳҳо, нақлиёт ва дигар соҳаҳо мебошад.
Мушаххасот
| Намуна | PWS-25N | PWS-100N |
| Ҳадди ниҳоии санҷиш | 25N | 100N |
| Рамзи Қудрати санҷишӣ | 1/180000 | |
| Ихтиёрии нерӯи қувва | дар дохили ± 0,5% | |
| Диапазони андозагирии муҳоҷират | 0 ~ 150 (± 75) (MM) | |
| Ҷузъи ченаки муҳоҷират | 0.001mm | |
| Хатогии нисбии арзиши андозагирии Shangrice | дар дохили ± 0,5% | |
| Фосилаи ба даст овардан | 0.01 ~ 100хаз | |
| Басомади стандартии санҷиш | 0.01-50Гц | |
| Санҷиши мавҷ | Мавҷи синус, мавҷи секунҷа, мавҷи мураббаъ, мавҷи синфӣ, мавҷи синнаш, мавҷи косин, мавҷи косин, мавҷи сеюми ним ва ғайра. | |
| Фазои санҷишӣ (бе риёкории) мм | 1600 (метавонад фармоишӣ) | |
| Паҳнои амволи дохилӣ мм | 650 (метавонад фармоишӣ) | |
Якхела
1) GB / T 2611-2007 "Талаботи умумии техникӣ барои мошинҳои озмоишӣ"
2) GB / T16825.1-2008 "Санҷиши мошини санҷиши статикии статикӣ Конференсия
3) GB / T 16826-2008 "Мошини озмоиши санҷиши Endraquical Services
4) jb / T 8612-1997 мошини санҷиши Undraquical Services
5) jb9397-20022 "Шартҳои техникии шиддат ва фишори техникии тестӣ"
6) GB / T 3075-2008 "металлии металл усули озмоиши металл"
7) GB / T15248-2008-2008 «Амшқати доимии меҳвари доимӣ
8) GB / T2143-2007-2007 «Усули санҷиши ягона барои мустаҳкамкунии канданиҳои металлӣ»
9) HG / T 2067-1991 Шӯъбаи хастагӣ
10) ASTM E466 Санҷиши стандартии KIC барои қатори хаттӣ ба қитъаи хаттӣ ба қитъаи хатсайри варақаҳои металлӣ
11) astm e1820 2001 Стандарти санҷиши JIC барои ченаки сахти сахт
Хусусиятҳои асосӣ
1 мизбон:Хоҳҳо аз чаҳорчӯбаи боркунӣ, маҷлиси бандами хатсайри хаттурии меҳвари болоӣ, як манбаи нафтӣ, серверҳои гидравликӣ, системаи андозагирӣ ва назорат ва лавозимоти озмоишӣ иборат аст.
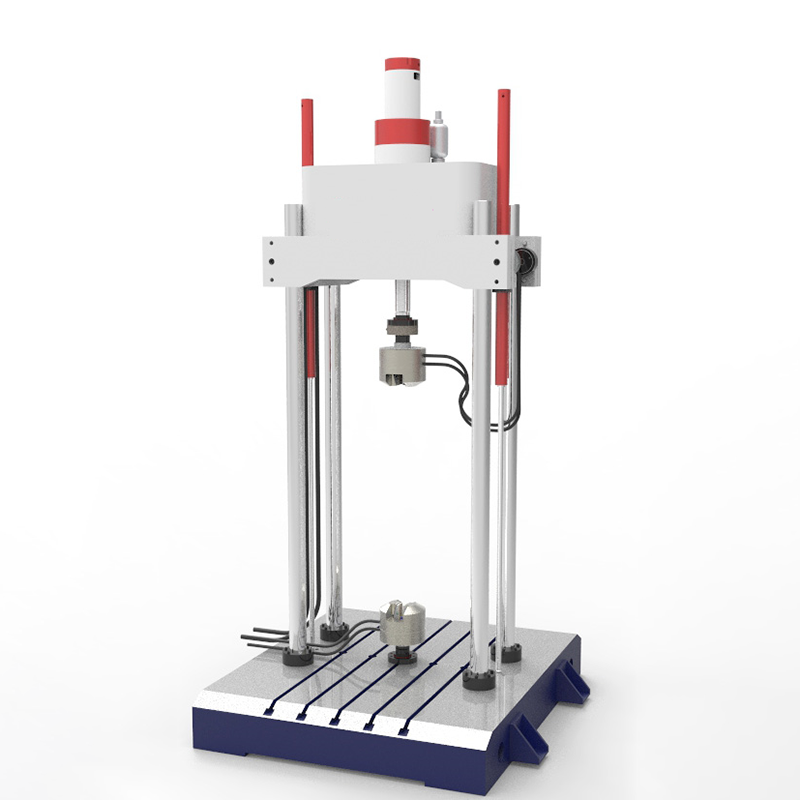
2 Чорчӯбаи пурборкунӣ:
Боркунии мошини асосӣ аз чор ростҳост, болиштҳои SHORTILE ва корхона иборат аст, ки барои ташкили чаҳорчӯбаи пӯшида. Сохтори паймон, сахттарин ва ҷавоби босуръати динамикӣ.
2.1 Иқтидори меҳнати меҳвар: ≥ ≥ ± 100n;
2.2 ХУСИД: Гидризинги гидравликӣ, қулфи гидравликӣ;
2.3 Фазои озмоишӣ: 650 × 1600 мм
2.4 Сенсори боркунӣ: (Қаннли)
2.4.1 Микдори тахассусии санҷиш: 100 сония
2.4.2 нусхаи сенсори: ± 0.1%;
2.4.3 Эрод сенсор: 150%.
3 Сервати Hydraeic Servic Auntuator Lindial:
3.1
3.1.1 Сохтор: Тарҳрезии интегратсионии ACTO Servicator, Калони сервер, сенсори сарборӣ, сенсори муҳоҷират ва ғайра.
3.1.2 Хусусиятҳо: Насби муттаҳидкунии муттаҳидшудаи пойгоҳи сарборӣ бо занҷири борик чанд нафарро такмил медиҳад, сатҳи баланди системаро беҳтар мекунад ва муқовимати паҳлуии паҳлӯ дорад.
3.1.3 Басомади ҳосилнокӣ: 0.01 ~ 100ГЗ (басомади санҷиш дар маҷмӯъ зиёд нест 70ГЗ);
3.1.4 Танзимот:
а. Актуэйти хатӣ: 1
I. Сохтор: Асои 4 дучанд амали симметрӣ;
II. Қувваи максималии санҷиш: 100 ud;
III. Фишори кории баҳогузорӣ: 21mpa;
IV. Кӯшиши поршен: ± 75 мм; ЭЗОҲ: Минтақаи буфери гидравликро таъин кунед;
б. Калидҳои электровикӣ: (Бренди воридшуда)
I. модел: g761
II. Ҷараёни таъми: 46 л / min 1 пора
III. Фишори баҳогузорӣ: 21mpa
IV. Фишори корӣ: 0,5 ~ 31.5 MPA
в. Як санҷиши кӯчиш
I. модел: Силсилаи HR
II. Диапазони ченкунӣ: ± 75 мм
III. ҚИСОСАҲО: 1О
IV. NOT-VINERITE: <± 0.01% -и миқёси пурра>
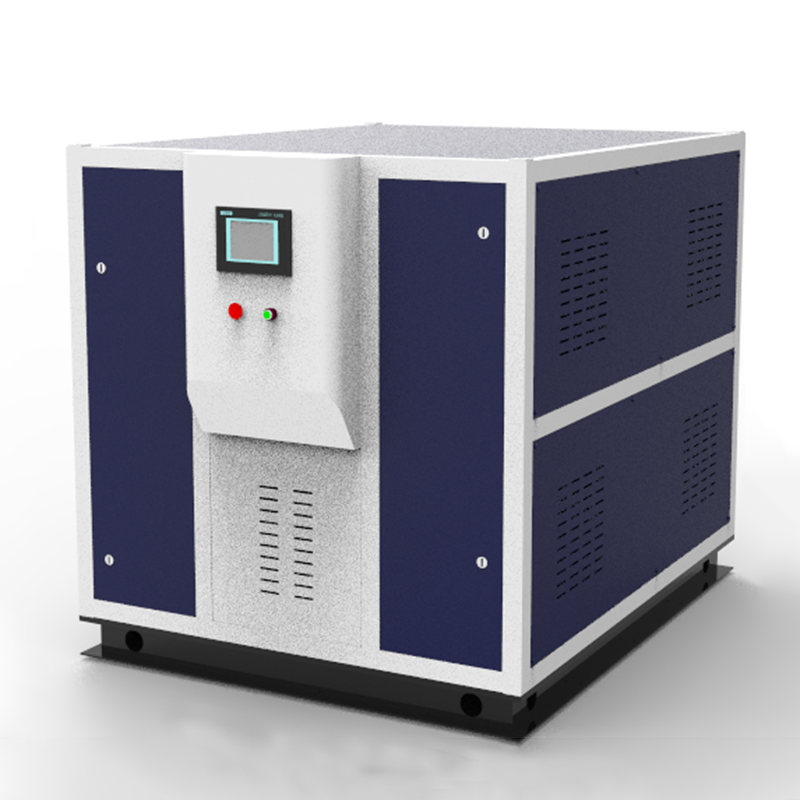
4 гидравликӣ Serveo Stare Storm
Стансияи насосӣ як пойгоҳи стандартӣ бо тарроҳии модулӣ мебошад. Аз ҷиҳати назариявӣ, он метавонад ба як истгоҳи бузурги насосӣ бо ҳар ҷоришаванда боздорад, бинобар ин миқёси хуб ва истифодаи кофӣ дорад.
· Равандаи умумӣ 46L / дақ, фишор 21mpa. (Мутобиқи талаботи таҷрибавӣ танзим карда мешавад)
Қудрати умумии 22 кВ, 380V, се марҳила, 50ГЗ, AC.
Осмони насосӣ тибқи тарроҳии стандартии модулӣ таҳия ва истеҳсол карда мешавад, ки технологияи баркамол ва иҷрои мӯътадил таҳия ва истеҳсол карда мешавад; Он бо шиддати РОЙГОНИ РӮЗИ СОЛАТЕТАТҲОБИНИИ СОЛАТҲОБИНГИРИИ СОЛАТҲО.
Стансияи насос аз насоси равған, маблагатҳо, фишори баланд ва паст аст
Системаи филтратсияи филтратсия филмҳои се марҳиларо қабул мекунад: Поржаи насби равған, порти насби равған, 100то; Нусхаи манбаи нафт, дақиқии филтратсия 3μ; Модули танзимгари арафазаи Резджатори Рейт, Филтратсия дақиқии 3μ.
· Насос равған аз насоси фишанги дохилӣ интихоб карда мешавад, ки тавассути насоси фишанги зичии фишори дохилии фишори дохилии гармӣ, садои паст, давомнокии аъло ва умри дарозро қабул мекунад;
Воҳиди мобайнии нафтӣ бо дастгоҳи намӣ муҷаҳҳаз карда шудааст (PATAMPERPERPER-ро интихоб кунед) барои кам кардани ларзиш ва садо;
· Барои оғоз ва боздоштани системаи гидравликӣ гурӯҳи баланд ва кам истифода баред.
Соҳиби сӯзишвории стенди сӯзишвории стандартӣ илова карда мешавад, ҳаҷми зарфи сӯзишворӣ камтар аз 260L аст; Он вазифаҳои андозагирии ҳарорат, филмҳои ҳавоӣ, намоиши сатҳи нафт ва ғайра;
Сатҳи Линатҳо: 40Л / дақ, 21мпа
5. 5 маҷбур шуд, ки илова ба илова (ихтиёрӣ)
5.5,5,1 гидравликӣ chuck chuck. муқаррар;
Қӯраки маҷбурӣ, фишори корӣ 21ммо 21ММ, ба талаботи басомадҳои баланд ва паст хастагӣ Системаи шиддатнокии моддӣ ва фишурдани худро ба убур кардани сифр месанҷад.
фишори корӣ метавонад танзим карда шавад, диапитаи Танзимот 1мP-21МPA;
· сохтори кушод, осон иваз кардани даҳони.
· Ҳикояи қуфлкунии худкушӣ, сенсори сарбориро дар қисми болоии муҳаррики асосӣ ва поршени Актуаторати поёнӣ пайваст кунед.
· ларзидани даҳони барои намунаҳои мудаввар: 2 маҷмӯи; jaws барои намунаҳои ҳамвор қубурҳо: 2 маҷмӯи; (васеъшаванда)
5.5.2 Як маҷмӯи СПИД барои ҷиноҳият ва санҷишҳои хамида:
L · Як маҷмӯи зарбаи фишор бо диаметри φ80 мм
· Маҷмӯаи СПИД-и спиртӣ барои санҷиши вазни хастагӣ тарки мактаб.