Изҳорот
Мошинҳои фоҳишаи Clictister-jp20ак Мошини озмоиши хастагӣ асосан барои озмоиши ҳаёти ба ларза даровардашуда ва бархурдорони зарбаи баунсохта, ки бо тестҳои гуногуни мошинҳои гуногун, мошинҳои дутарафа, мошинҳо, мотосиклҳо ва дигар мошинҳои автомобилӣ истифода мешаванд. Нишонаҳои махсус инчунин метавонанд барои мувофиқ кардани санҷиши хастагӣ аз намунаҳои махсус анҷом дода шаванд.
Мошинҳои баҳори дастнорас, мошини санҷиши баландсифат дар асоси мошини санҷиши одилии озмоиши хастагӣ ба даст омадааст усулҳои техникӣ.
Мушаххасот
| Ном | намуд | ||
| 1 | Ҳадди ниҳоии санҷиш | 20N | |
| 2 | Шумораи пойгоҳҳои санҷишӣ | 1 | |
| 3 | Басомади санҷиш | 0.5 ~ 5Гц | |
| 4 | Намоиши басомад | 0.1 HZ | |
| 5 | Амплитсияи санҷиш | ± 50 мм | |
| 7 | Қарзҳои ҳадди аксар | 1 миллиард маротиба | |
| 8 | Ҳисобкунии дақиқ | ± 1 | |
| 9 | Максималии дарозии порчаи санҷишӣ | Φ90mm | |
| 12 | Рушди барқ | 380вак 50Гц | |
| 13 | Қудрати асосии автомобилӣ | 7.5 кв | |
| 14 | Андоза | Соҳибхона | 1200 * 800 * 2100 (H) |
| Қуттии назоратӣ | 700 * 650 * 1450 | ||
| 15 | Вазни | 450 кг | |
Хусусиятҳои асосӣ
1.1 Хост:Хоҳҳо асосан аз чаҳорчора, механизми механикӣ, механикӣ, механизми интиқол ва асбобро ташкил медиҳад. Чорчӯба аз як сутун, ватанӣ, як платформаи ҷолиб, чӯбчаи болоӣ, механизми лифт, пойгоҳ ва қисмҳои дигар иборат аст. Сутун, коркор, платформаи хушизонӣ, як чӯбчаи боло ва механизми лифт якҷоя ва ба таври устувор ҷойгир карда шудааст, ки дар пойгоҳ ҷойгир карда шудаанд; Дархуд кардани зарбаи санҷишӣ дар байни мизи истисноӣ ва буриши пешбарӣ тавассути танзими бардоштани буриши сарлавҳа гузошта мешавад ва порчаи санҷиши усулҳои гуногуни насбкунӣ метавонад бо тағир додани супориш. Талабот.
1.2 Механизми боркунӣ:Ин як сохтори механикӣ аст, ки асосан аз механизми каҷ ҷойгир аст, ки ба ҳаракати амудӣ ҳаракат мекунад; Бо тасҳеҳи эксцентрита аз лағжиш, масофаи ҳаракати бардурӯғ метавонад ба зарбаи санҷиш мутобиқи порчаи санҷишӣ танзим карда шавад.
1.3 Системаи интиқол:Механизми интилатӣ аз мотори се марҳила ва flywhelle иборат аст. Суръати моторро метавон бо таҷҳизоти басомад тасҳеҳ карда метавонад, то басомади санҷиш мустақилона дар доираи 0,5 то 5 HZ танзим карда шавад.
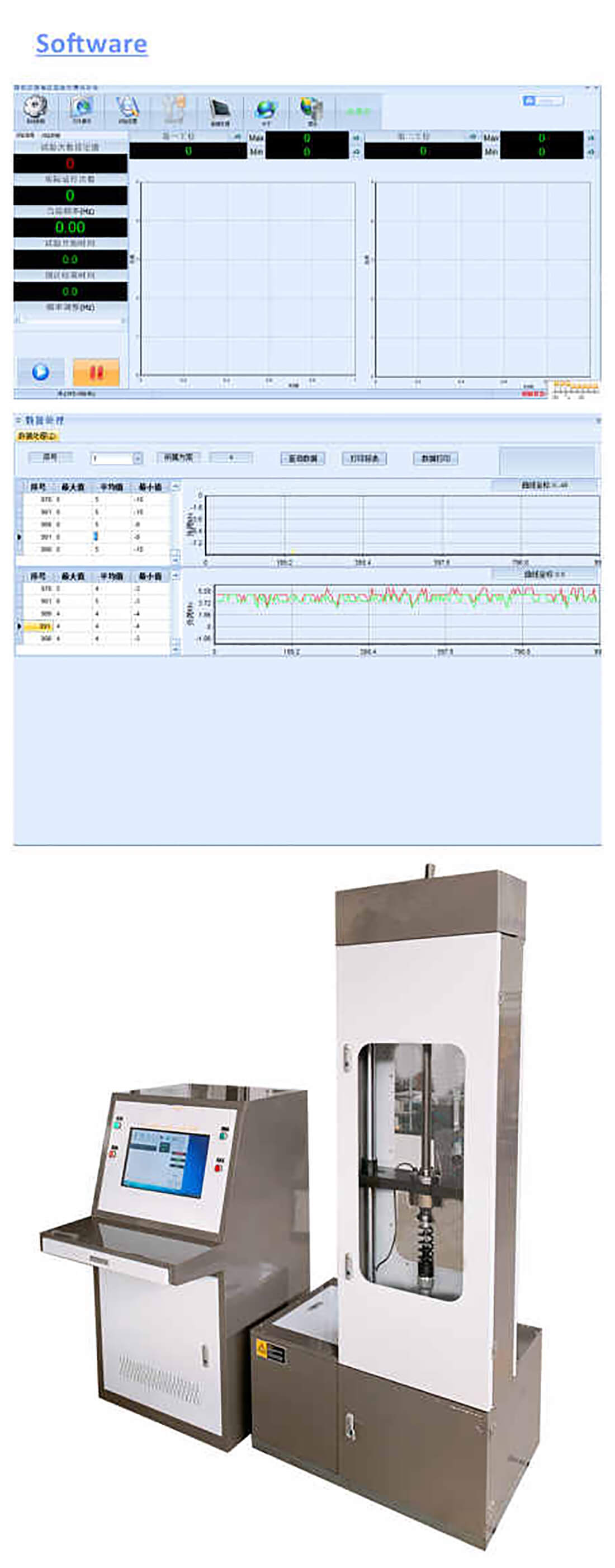
1.4 Системаи назорат:Системаи андозагирии компютер ва назорати компютер мустақилона аз ҷониби ширкати мо таҳия ва истеҳсол карда мешавад. Он вазифаи хотира, яъне маълумоти санҷиши таърихиро дар вақти дилхоҳ дастрас кардан мумкин аст. Системаи андозагирӣ ва назорат маркази дастгоҳи санҷишӣ мебошад. Аз як тараф, компютер сигнали санҷиширо дар вақти воқеӣ ҷамъ мекунад ва дар вақти воқеӣ қувваи озмоиширо нишон медиҳад ва параметрҳои мушаххасро нишон медиҳад, масалан, ҳар басомади санҷишӣ ва хати корӣ , параметрҳои идоракунӣ, параметрҳои назоратӣ бояд тибқи талаботи назорати фаврӣ муқаррар карда шаванд сигнали идоракуниро мефиристад ва контролерҳои пурқуввати ҷорӣ муҳаррики пойгоҳро назорат мекунад, функсияи тасҳеҳи ҷойҳоро дар тӯли санҷиш назорат мекунад, дар рафти санҷиш амал мекунад ва оператор ва таҷҳизотро муҳофизат мекунад Амният, тавре ки дар расм нишон дода шудааст:
1.5 функсияи нармафзор Муқаддима
1.5.1 Шумораи санҷишҳоро таъин кардан мумкин аст. Шумораи ҳадди ақалли иқтидори вақт 1 миллиард маротиба аст.
1.5.2 Шумораи санҷишҳо ба рақами муқарраршуда мерасад ва мошини санҷиш барои боздоштани санҷиш назорат карда мешавад.
1.5.3 Системаи нармафзори санҷишӣ басомади санҷишро намоиш медиҳад ва шумораи санҷишҳоро тавассути компютер нишон медиҳад ва танаффус ва хомӯширо судяҳо нишон медиҳад.
1.5.4 Он дорои функсияи хомӯш кардани автоматикӣ мебошад, вақте ки абсгрбер дар ҳама гуна истгоҳ хароб мешавад ва вазифаи қатъ кардани қувваи санҷиши санҷиши зарбаи зарбаи зарбаи зарбаи зарб ба сарбории нишондодашуда.
1.5.5 Он як функсияи воқеии қувваест, ки қувваи вақти санҷишии азхудан як ҷасади ягонаи абсорсро дорад ва маълумоти луғати абсоро мувофиқи давраи интихоб, ки аз ҷониби нақшаи санҷиш муқаррар кардааст, сабт мекунад.
1.6 Хусусиятҳои асосӣ чунинанд:
1.6.1 Ампелия ва басомад озодона танзим карда мешавад.
1.6.2 Намоиши рақамии вақтҳои ларзиш ва басомади.
1.6.3 қатъи худкор қатъии вақтҳои санҷиши пешакӣ, самаранокии баландтар.
1.6.4 Санҷиши як ҷуфт ҷуфтҳои абстрейн муборизаи шокро метавон иҷро кард ё санҷиши ҷуфтҳои гуногуни абнаграммаҳои шаффир иҷро кардан мумкин аст.
1.6.6 Шумораи муқаррарии хомӯш кардани хомӯш метавонад барои санҷишҳои беназорат истифода шавад;
1.6.7 сӯрохиҳои танзими санҷишӣ мавҷуданд;
1.6.8 бо асбоби тасмимгирии амполӣ, ки барои тасҳеҳи ампелия қулай аст;